智能机器人的多任务设计 从单一功能到适应性协作的演进

在当今科技飞速发展的时代,智能机器人已从科幻概念逐步融入现实生活与生产。针对不同任务场景的智能机器人设计,不仅是技术进步的体现,更是对人类需求多样化的回应。从工业制造到家庭服务,从医疗辅助到探索未知,智能机器人的研发正朝着更智能、更灵活、更协作的方向迈进。
一、 任务导向的设计哲学
智能机器人的设计核心始于明确的任务定义。不同任务对机器人的感知、决策、执行和交互能力提出了截然不同的要求。
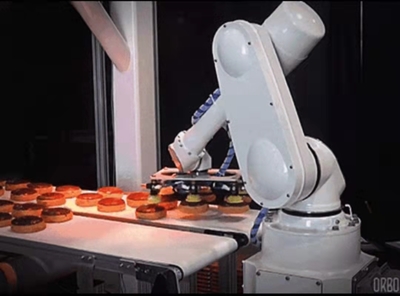
- 精密工业机器人:在汽车制造、电子产品组装等场景中,任务的核心是高精度、高重复性与高强度。设计重点在于机械臂的刚性、运动控制的准确性以及力反馈的灵敏性。例如,搭载高精度视觉系统的六轴机械臂,能够完成毫米级的焊接、涂胶或拧螺丝作业,其“智能”体现在路径优化、异常检测与防碰撞等方面。
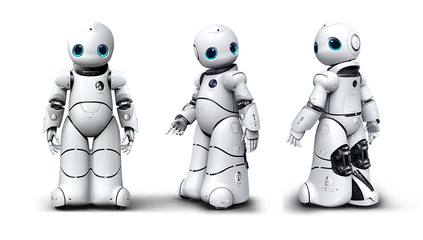
- 服务与陪伴机器人:在家庭、酒店或医院,任务的核心是安全、交互与情感化。设计需兼顾软硬件:硬件上要求外形亲和、移动平稳(如轮式或双足)、具备安全的触觉感应;软件上则需要强大的自然语言处理、情感计算与人脸识别能力。这类机器人不仅能完成送餐、清洁等任务,还能通过对话和表情提供情绪支持。
- 特种作业机器人:在灾难救援、太空探索、深海探测等极端环境中,任务的核心是环境适应性与自主生存能力。设计需极端注重鲁棒性,可能采用履带、多足或仿生结构以应对复杂地形,并配备多种传感器(热成像、气体检测、声呐等)在通信受限时进行自主决策。其“智能”体现在态势感知、路径规划与风险规避上。
二、 技术模块的差异化集成
针对不同任务,研发人员需对核心技术模块进行差异化配置与深度优化:
- 感知系统:工业机器人可能依赖激光雷达与高分辨率工业相机;家庭机器人则需要麦克风阵列与RGB-D摄像头(如Kinect)来理解语音和手势;而探险机器人则需集成更抗干扰的传感器,如合成孔径雷达或地穿透雷达。
- 决策与AI大脑:底层逻辑从预编程脚本,发展到基于任务的机器学习模型。工业场景可能采用数字孪生技术进行仿真预演;服务机器人依赖大规模的对话和场景数据集进行训练;自主移动机器人则严重依赖于同步定位与地图构建(SLAM)算法以及强化学习来适应动态环境。
- 执行与本体:材料、驱动方式(电动、液压、气动)和结构形态(固定基座、移动平台、软体机器人)完全取决于任务。装配机器人追求速度与精度,可能采用轻质碳纤维;而救灾机器人则需要耐高温、防辐射的合金材料。
- 人机交互(HRI)界面:工业机器人可能只需简单的示教器或编程接口;服务机器人需要直观的语音、触摸屏甚至手势交互;而用于手术的机器人则需要提供力反馈的精密遥操作界面。
三、 研发挑战与未来趋势
智能机器人的多任务研发面临诸多挑战:技术通用性与任务专用性之间的平衡、成本控制、安全与伦理问题(尤其是自主决策权),以及跨场景知识迁移的困难。
未来趋势正指向:
- 模块化与可重构设计:像乐高一样,通过标准化接口快速组合不同的感知、执行模块,以适应快速变化的任务需求。
- 云机器人技术:将部分计算与数据存储置于云端,使单体机器人能获取更强大的算力支持与共享知识库,实现“群体智能”和学习成果的快速分发。
- 人机融合协作:从“机器换人”走向“人机协同”,机器人更能理解人类意图,成为增强人类能力的智能伙伴,如在工厂中与工人安全地共享工作空间并协同作业。
- 具身智能的发展:强调机器人在物理环境中通过交互进行学习,使其不仅能处理信息,更能通过身体行动来理解和改造环境,向真正的适应性智能迈进。
不同任务下的智能机器人设计是一个高度交叉的系统工程,它融合了机械工程、计算机科学、人工智能、材料学甚至心理学。成功的研发不在于追求技术的全面领先,而在于对特定任务场景的深刻洞察与精准的技术实现。未来的智能机器人,将不再是执行单一指令的工具,而是能够理解上下文、灵活调整策略、并与人类及其他机器无缝协作的智能实体,深度赋能千行百业,重塑我们的工作与生活方式。
如若转载,请注明出处:http://www.ddboot.com/product/39.html
更新时间:2026-06-19 02:56:06